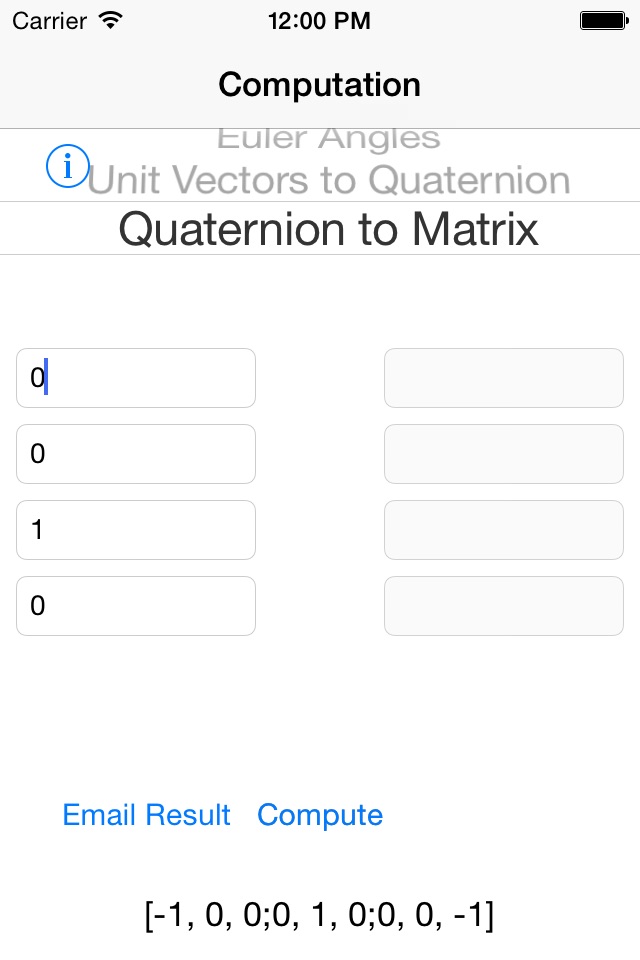


QuaternionCalc
Performs quaternion operations. Includes operations are quaternion transpose, quaternion multiplication, forward transformations, reverse transformations, conversion from quaternion to Euler angles and generation a quaternion from two unit vectors.